
We recently discovered that our SatNOGS rotor was mounted with a 90 degrees offset, which made our setup a bit tricky to use. Our efforts to do a drop-in replacement of the broken USRP N210 with an RTL-SDR were therefore temporarily blocked.

LA3WUA Øyvind and LB6RH Jens went on to make the appropriate corrections a couple of weeks ago.

Long-legged assistance was needed from LB6RH due to our dear little friend LA3WUA not being able to reach the antenna (note from dear little blog post author: I wouldn’t either).

The rotor controller was set to 180 degrees azimuth, and the rotor appropriately rotated to the physically appropriate rotation direction towards Vassfjellet.

Good work, Jens! And good work to you too, supporting background character/photographer LA3WUA.
Unfortunately, we were not quite finished. Continuing off of the software issues in the last post, we realized we should upgrade to the latest Ubuntu LTS. This gave us a librtlsdr version without the No supported tuner found issues, and everything was looking good for some time.
Before we did that, we also scheduled a couple of observations just to see whether the full software system was working as expected, and discovered that our observations were not really uploaded to the server. This was not that surprising since there had been major releases of the SatNOGS client software since we installed it. The entire installation in any case broke down after the Ubuntu upgrade due to some Python incompatibility issues, so it was a good time for getting up to scratch with the latest versions. LB6RH went to work.
Turns out that there exists a Debian package repository for the SatNOGS software. Unfortunately, these packages were not as compatible with our Ubuntu installation as we could have wished, due to strict dependencies on e.g. Python3.7-related packages, while Ubuntu 20.04 LTS has only Python3.8 available. After getting started on building from scratch, we sat back, thought for a bit, and realized – why suffer? We should just make the switch to Debian, and mirror the build system of the SatNOGS team.
And so we did (or, well, Jens did). Jens could conveniently use the standard instructions for using Ansible to set up the system, which might be a story for another time, and presto – we had a working SatNOGS system again.
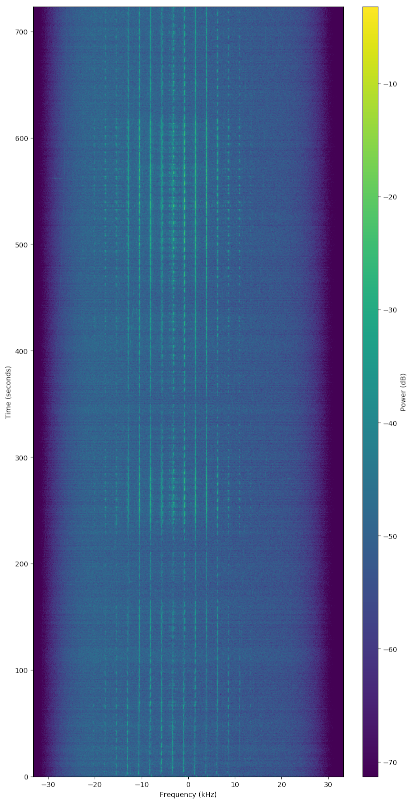
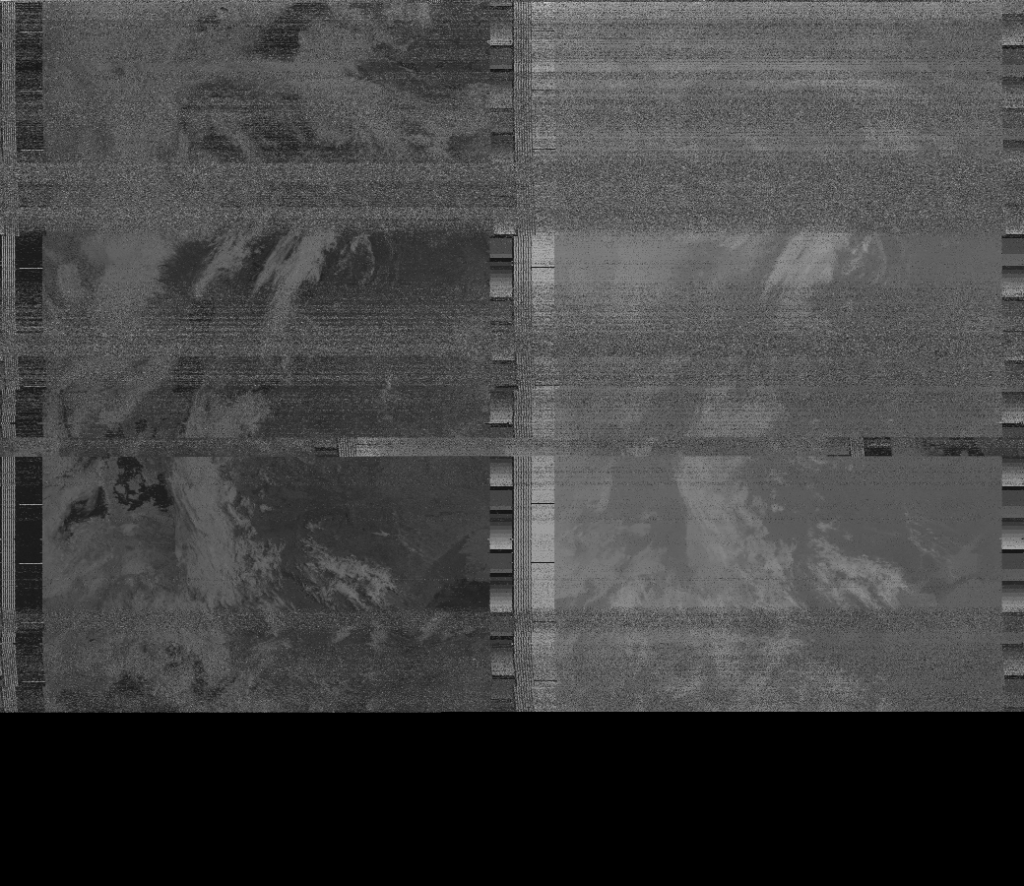
We are used to rather horrible NOAA reception, which made relatively good signal reception here a pleasant surprise. Whether this is due to our old USRP N210 being exceptionally crappy towards the end, or due to exceptionally low noise conditions during the summer months, we don’t know yet, but it will be exciting to see in the long run.
We are still not quite finished since our rotor controller is acting up and sporadically timing out again, so we are making do with fixed antenna positioning for the time being until we can figure out what is wrong with the controller.

gm
i tested satnog too and receive these horrible pics..in same time i test and other distribution like https://github.com/reynico/raspberry-noaa and the pics are nice (check my twt account), i dont understand why …
doc is not very clear …for beguinners
73 Eric F1SMV